

購入したオープンソースロボットOTTOを検品する。
何とか2019年のゴールデンウィークは10連休を確保できた。久しぶりに本ブログの更新を行うべくネット内をうろうろとしていたところ、“OTTO”というオープンソースロボットを見つけた。当初は、部品を集め、ボディーも3Dプリンターで造形する必要があるのか、とげんなりしたが、Google先生のおかげでBanggoodで売られているキットにたどり着いた。送料・保険料込みで4,600円、これ幸いと4月21日に発注した。発送方法として選択したJapan Direct Mailでは、BanggoodにログインしてMy Orders→Trackで表示されるTrack No.を使用すると、輸送状況がOCSのサイトで確認できる。トラッキングできないことも多いeBayに比べれば安心であった。とはいえ、中国サイトでの購入品は色々と問題があるのも事実。そこで、平成最後のエントリーとして、まずは部品の検品を行う。

部品はプラスティックケースに収められ、中、外ともそれなりに緩衝材で保護されていた。内容物は、組み立てマニュアルに記載されている部品と同じであった。
- 頭
- 胴体
- 脚×2
- 足×2
- 超音波センサーHC-SR04
- サーボSG90×4
- SG90付属のアームとねじのセット×4
- 単三電池ホルダー
- Arduino NANO シールド
- Arduino NANO
- USBケーブルA‐ミニB
- スイッチ(電池ホルダーに接続済)
- ブザー
- ジャンパーワイヤーメス‐メス×8
- プラスドライバー
次に動作確認。Arduino NANOをシールドに載せる。シールド側ピンソケットの傾きが大きく、刺すのに大分難儀した。付属のケーブルでPCと接続し、おなじみ「Lチカ」を試みる。スケッチを新規作成しなくても、ファイル→スケッチ例→01.Basics→Blinkをそのまま使えばよい。スケッチの書き込みにはやや注意が必要である。ツール→ボードは“Arduino Nano”、ツール→プロセッサは“ATmega328P (Old Bootloader)”を選択する。デフォルトの“ATmega328P”では書き込みエラーとなり、しばらく悩まされた。
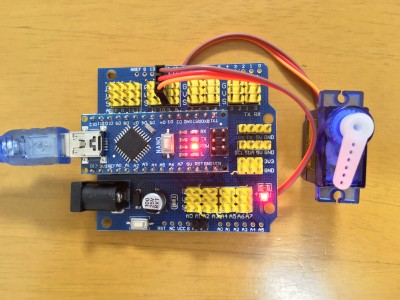
「Lチカ」に成功したら、4つのサーボの動作確認に移る。ねじ止めせずに短いアームを付け、茶色のリード線がG、黄色のリード線がSに来るようにデジタル9番に接続する。
#include <Servo.h>
Servo servo;
int servo_pin = 9;
void setup() {
servo.attach(servo_pin);
int i;
for (i = 0; i <= 180; i++) {
servo.write(i);
delay(20);
}
delay(500);
for (i = 180; i >= 0; i--) {
servo.write(i);
delay(20);
}
delay(500);
for (i = 0; i <= 90; i++) {
servo.write(i);
delay(20);
}
}
void loop() {
}上記のスケッチを書き込むと、アームが左右に振れ、中央位置で停止する。これを付属の4つ全てで行い、モーターが正常に動くことを確認するとともにセンタリングを行う。続く動画は手振れがひどいので、乗り物に弱い方は注意してご覧いただきたい。ごめんなさい。
明日5月1日は、令和最初のエントリーとして組み立てを紹介したい。

コメント