

部品検品後のオープンソースロボットOTTOを組み立てる。
予告どおり、令和最初のエントリーとしてオープンソースロボットOTTOを組み立てる。組み立てマニュアルどおりであっけないものであった、とはならず、「 中国サイトでの購入品は色々と問題 」があった。検品したはずでは、というご意見はごもっとも。一つだけ大事な部品を確かめていなかったのである。出来上がってしまえばそれもいい思い出。くやしい。
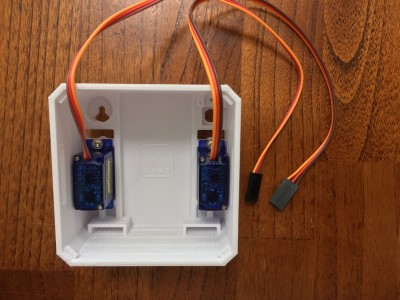
マニュアル1-bまで。向かって右のサーボが上手くはまらず、400番のサンドペーパーで穴を広げた。2に進む前にモーターのセンタリングをお忘れなく。
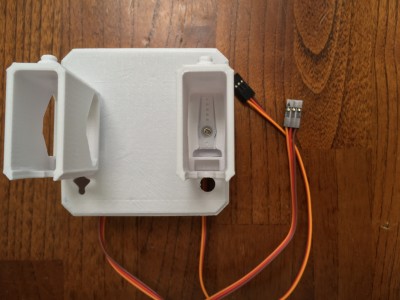
マニュアル2-bまで。マニュアルでは、長辺はアームの穴2つ分、短辺は4つ分切り落とすことになっている。この成形品では、長辺は1つ分、短辺は5つ分と短辺側に寄っていた。

マニュアル4bまで。こちらが出来上がり背面となる。サーボから出る3本の線をねじれなく胴体に通すと、茶色(GND)が右に出るはず。端子は、胴体側からピンセットなどで引っ張り上げるより、脚側からドライバーなどで押し込むほうが楽であった。
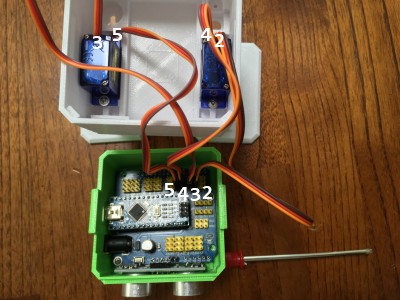
マニュアル7まで。左脚を2、右脚を3、左足を4、右足を5に、それぞれI/Oシールドに接続する。後でブザーをはめる丸穴が左上、スイッチをはめる角穴が右上にくるよう、向きを間違えずに。
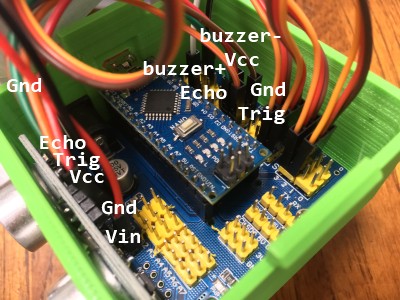
マニュアル10まで。超音波センサーの配線はマニュアルどおりで、Vccが赤、Trigが橙、Echoが緑、Gndが茶色。この順に、I/Oシールドの9-V、8-S、9-S、8-Gに接続する。また、ブザーの+(表面に印がある)を白、-を黒として、それぞれ13-S、13-Gに接続する。電池ボックスから出ているジャンパーワイヤーの赤(+)は図の手前Vin、黒(-)はその奥Gndに接続する。
淡々と記したが、この電池ボックス‐スイッチ‐ジャンパーワイヤーの配線が曲者であった。一旦組み立てた後、スイッチを入れても通電しない。テスターで導通をとると、見事に断線していた。配線を切り離し、これでもかと付着していたグルー材をタクトスイッチからこそげ落として、はんだ付け直した。ついでに、マニュアル記載のとおり、サーボ付属の短いアームをスイッチに通して、ねじ止めできるようにした。
後は頭をはめるだけ。付属のUSBケーブルでPCと接続し、Arduino IDEでスケッチを書き込む。Aruduino用のコーディングガイドにはOtto_avoid.inoと記載されているが、サンプルスケッチはOtto_avoid_mhsとOtto_avoid_TRIMSの2つがある。上の動画はTRIMSのほう。これは左が利き足のようで、少しずつ右に曲がっていく。かわいい。

コメント